การพิมพ์บนแป้นพิมพ์ การกดปุ่มบนรีโมตคอนโทรล หรือการมัดผม จัดว่าเป็นเรื่องยากสำหรับผู้ใช้มือประดิษฐ์หรือมือเทียม ปัจจุบันมือเทียมที่ใช้ตัวรับสัญญาณไฟฟ้าในกล้ามเนื้อ (myoelectric) ผู้ใช้งานสามารถควบคุมความสัมพันธ์การจับได้ทีละครั้งเท่านั้น แม้ว่ามือเทียมสมัยใหม่จะควบคุมแต่ละนิ้วได้ตามกลไก
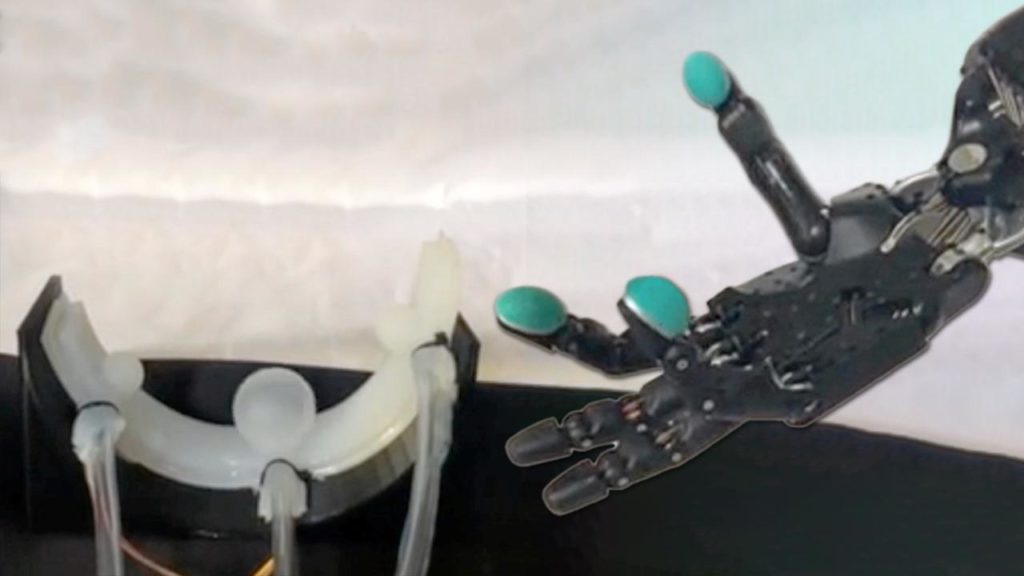
ล่าสุดทีมวิจัยนำโดยนักวิทยา ศาสตร์จากวิทยาลัยวิศวกรรมศาสตร์และวิทยาการคอมพิวเตอร์แห่งมหาวิทยาลัยฟลอริดาแอตแลนติก ในสหรัฐอเมริกา ได้ออกแบบปลอกแขนหุ่นยนต์สวมได้แบบใหม่ ซึ่งติดตั้งอุปกรณ์ที่ทำหน้าที่ควบคุมและจำกัดการเคลื่อนไหว ให้ถ่ายทอดความรู้สึกตามสัดส่วนของแรงสัมผัสได้ไปยังนิ้ว 3 นิ้ว คือนิ้วหัวแม่มือ นิ้วชี้ นิ้วก้อยของมือประดิษฐ์ รวมถึงติดตั้งเครื่องกระตุ้นแบบสั่นเพื่อระบุว่าวัตถุที่จับนั้นหักพัง หรือตกหล่นลงมาหรือไม่ ทีมได้ทดสอบการควบคุมแรงยึดเกาะกับวัตถุ 2 ชิ้นของมือประดิษฐ์เพียงมือเดียว โดยให้ผู้ทดสอบใส่ปลอกแขนและขยับนิ้วเหมือนกำลังหยิบจับสิ่งของ ซึ่งจะถ่ายทอดไปยังมือประดิษฐ์ให้หยิบจับสิ่งของขึ้นมาเช่นกัน ผลการทดสอบชี้ให้เห็นถึงการตอบสนองสัมผัส ที่ช่วยให้ผู้ใช้งานปลอกแขนหุ่นยนต์ สามารถควบคุมให้มือเทียมจับยึดและขนส่งวัตถุ 2 ชิ้นพร้อมกันได้สำเร็จ โดยที่มือเทียมก็มีความกระฉับกระเฉง ไม่ทำลายสิ่งของหรือทำตกเสียหาย
นักวิจัยเผยว่า นวัตกรรมปลอกแขนหุ่นยนต์แบบสวมใส่ได้รุ่นนี้อาจเป็นตัวเปลี่ยนเกมสำหรับผู้ใช้มือเทียมที่รอคอยความก้าวหน้าด้านความคล่องแคล่วมานาน และการพัฒนาสร้างปลอกแขนดังกล่าวอาจช่วยกระตุ้นการเปลี่ยนแปลงวิธีการทำงานของมือเทียมที่ใช้กันอยู่ทุกวันนี้และในอนาคต.
(Credit : Florida Atlantic University)